定位内存泄漏基本上是从宏观到微观,进而定位到代码位置。
从/proc/meminfo可以看到整个系统内存消耗情况,使用top可以看到每个进程的VIRT(虚拟内存)和RES(实际占用内存),基本上就可以将泄漏内存定位到进程范围。
之前也大概了解过/proc/self/maps,基于里面信息能大概判断泄露的内存的属性,是哪个区域在泄漏、对应哪个文件。辅助工具procmem输出更可读的maps信息。
下面分别从进程地址空间各段划分、maps和段如何对应、各段异常如何定位三方面展开。
1.进程地址空间划分
1.1 段及其作用
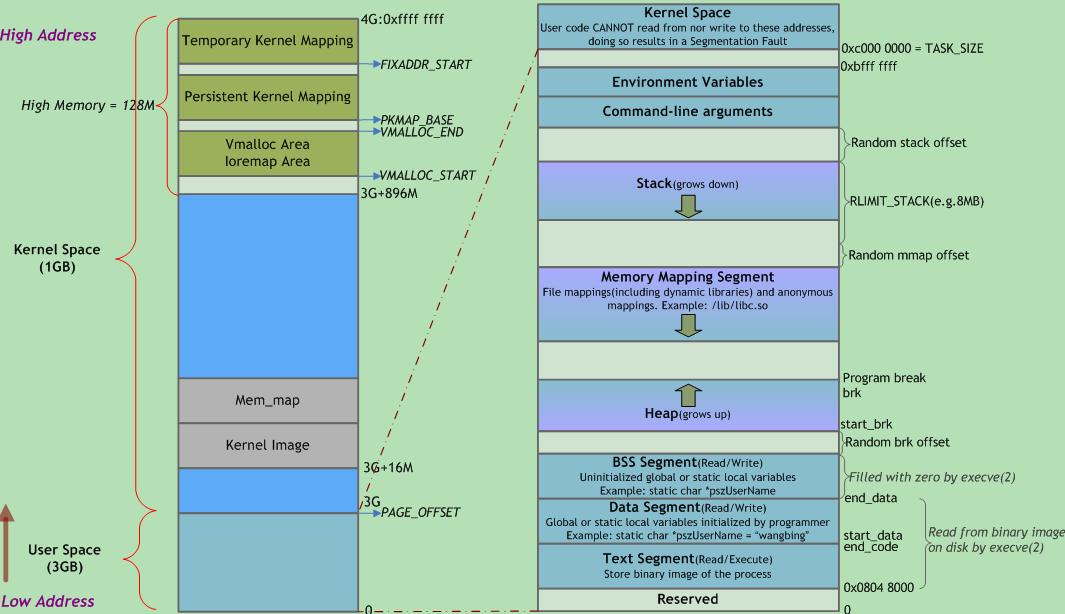
首先通过下图简单看一下,进程地址空间从低地址开始依次是代码段(Text)、数据段(Data)、BSS段、堆、内存映射段(mmap)、栈。
1.1.1 代码段(text)
代码段也称正文段或文本段,通常用于存放程序执行代码(即cpu执行的机器指令)。一般C语言执行语句都编译成机器代码保存在代码段。通常代码段是可共享的,因此频繁执行的程序只需要在内存中拥有一份拷贝即可。
代码段通常属于只读,以防止其他程序意外地修改其指令(对该段的写操作将导致段错误)。某些架构也允许代码段为可写,即允许修改程序。
代码段指令根据程序设计流程依次执行,对于顺序指令,只会执行一次(每个进程);若有反复,则需使用跳转指令;若进行递归,则需要借助栈来实现。
代码段指令中包括操作码和操作对象(或对象地址引用)。若操作对象是立即数(具体数值),将直接包含在代码中;若是局部数据,将在栈区分配空间,然后引用该数据地址;若位于BSS段和数据段,同样引用该数据地址。
代码段最容易受优化措施影响。
1.1.2 数据段(Data)
数据段通常用于存放程序中已初始化且初值不为0的全局变量和静态局部变量。数据段属于静态内存分配(静态存储区),可读可写。
数据段保存在目标文件中(在嵌入式系统里一般固化在镜像文件中),其内容由程序初始化。例如,对于全局变量int gVar = 10,必须在目标文件数据段中保存10这个数据,然后在程序加载时复制到相应的内存。
数据段与BSS段的区别如下:
1) BSS段不占用物理文件尺寸,但占用内存空间;数据段占用物理文件,也占用内存空间。
对于大型数组如int ar0[10000] = {1, 2, 3, …}和int ar1[10000],ar1放在BSS段,只记录共有10000*4个字节需要初始化为0,而不是像ar0那样记录每个数据1、2、3…,此时BSS为目标文件所节省的磁盘空间相当可观。
2) 当程序读取数据段的数据时,系统会出发缺页故障,从而分配相应的物理内存;当程序读取BSS段的数据时,内核会将其转到一个全零页面,不会发生缺页故障,也不会为其分配相应的物理内存。
运行时数据段和BSS段的整个区段通常称为数据区。某些资料中“数据段”指代数据段 + BSS段 + 堆。
1.1.3 BSS段
BSS(Block Started by Symbol)段中通常存放程序中以下符号:
- 未初始化的全局变量和静态局部变量
- 初始值为0的全局变量和静态局部变量(依赖于编译器实现)
- 未定义且初值不为0的符号(该初值即common block的大小)
C语言中,未显式初始化的静态分配变量被初始化为0(算术类型)或空指针(指针类型)。由于程序加载时,BSS会被操作系统清零,所以未赋初值或初值为0的全局变量都在BSS中。BSS段仅为未初始化的静态分配变量预留位置,在目标文件中并不占据空间,这样可减少目标文件体积。但程序运行时需为变量分配内存空间,故目标文件必须记录所有未初始化的静态分配变量大小总和(通过start_bss和end_bss地址写入机器代码)。当加载器(loader)加载程序时,将为BSS段分配的内存初始化为0。在嵌入式软件中,进入main()函数之前BSS段被C运行时系统映射到初始化为全零的内存(效率较高)。
注意,尽管均放置于BSS段,但初值为0的全局变量是强符号,而未初始化的全局变量是弱符号。若其他地方已定义同名的强符号(初值可能非0),则弱符号与之链接时不会引起重定义错误,但运行时的初值可能并非期望值(会被强符号覆盖)。因此,定义全局变量时,若只有本文件使用,则尽量使用static关键字修饰;否则需要为全局变量定义赋初值(哪怕0值),保证该变量为强符号,以便链接时发现变量名冲突,而不是被未知值覆盖。
某些编译器将未初始化的全局变量保存在common段,链接时再将其放入BSS段。在编译阶段可通过-fno-common选项来禁止将未初始化的全局变量放入common段。
1.1.4 堆(heap)
堆用于存放进程运行时动态分配的内存段,可动态扩张或缩减。堆中内容是匿名的,不能按名字直接访问,只能通过指针间接访问。当进程调用malloc(C)/new(C++)等函数分配内存时,新分配的内存动态添加到堆上(扩张);当调用free(C)/delete(C++)等函数释放内存时,被释放的内存从堆中剔除(缩减) 。
分配的堆内存是经过字节对齐的空间,以适合原子操作。堆管理器通过链表管理每个申请的内存,由于堆申请和释放是无序的,最终会产生内存碎片。堆内存一般由应用程序分配释放,回收的内存可供重新使用。若程序员不释放,程序结束时操作系统可能会自动回收。
堆的末端由break指针标识,当堆管理器需要更多内存时,可通过系统调用brk()和sbrk()来移动break指针以扩张堆,一般由系统自动调用。
使用堆时经常出现两种问题:1) 释放或改写仍在使用的内存(“内存破坏”);2)未释放不再使用的内存(“内存泄漏”)。当释放次数少于申请次数时,可能已造成内存泄漏。泄漏的内存往往比忘记释放的数据结构更大,因为所分配的内存通常会圆整为下个大于申请数量的2的幂次(如申请212B,会圆整为256B)。
1.1.5 内存映射段(mmap)
此处,内核将硬盘文件的内容直接映射到内存, 任何应用程序都可通过Linux的mmap()系统调用请求这种映射。内存映射是一种方便高效的文件I/O方式, 因而被用于装载动态共享库。用户也可创建匿名内存映射,该映射没有对应的文件, 可用于存放程序数据。在 Linux中,若通过malloc()请求一大块内存,C运行库将创建一个匿名内存映射,而不使用堆内存。”大块” 意味着比阈值 MMAP_THRESHOLD还大,缺省为128KB,可通过mallopt()调整。
该区域用于映射可执行文件用到的动态链接库。在Linux 2.4版本中,若可执行文件依赖共享库,则系统会为这些动态库在从0x40000000开始的地址分配相应空间,并在程序装载时将其载入到该空间。在Linux 2.6内核中,共享库的起始地址被往上移动至更靠近栈区的位置。
从进程地址空间的布局可以看到,在有共享库的情况下,留给堆的可用空间还有两处:一处是从.bss段到0x40000000,约不到1GB的空间;另一处是从共享库到栈之间的空间,约不到2GB。这两块空间大小取决于栈、共享库的大小和数量。这样来看,是否应用程序可申请的最大堆空间只有2GB?事实上,这与Linux内核版本有关。在上面给出的进程地址空间经典布局图中,共享库的装载地址为0x40000000,这实际上是Linux kernel 2.6版本之前的情况了,在2.6版本里,共享库的装载地址已经被挪到靠近栈的位置,即位于0xBFxxxxxx附近,因此,此时的堆范围就不会被共享库分割成2个“碎片”,故kernel 2.6的32位Linux系统中,malloc申请的最大内存理论值在2.9GB左右。
1.1.6 栈(stack)
栈又称堆栈,由编译器自动分配释放,行为类似数据结构中的栈(先进后出)。堆栈主要有三个用途:
- 为函数内部声明的非静态局部变量(C语言中称“自动变量”)提供存储空间。
- 记录函数调用过程相关的维护性信息,称为栈帧(Stack Frame)或过程活动记录(Procedure Activation Record)。它包括函数返回地址,不适合装入寄存器的函数参数及一些寄存器值的保存。除递归调用外,堆栈并非必需。因为编译时可获知局部变量,参数和返回地址所需空间,并将其分配于BSS段。
- 临时存储区,用于暂存长算术表达式部分计算结果或alloca()函数分配的栈内内存。
持续地重用栈空间有助于使活跃的栈内存保持在CPU缓存中,从而加速访问。进程中的每个线程都有属于自己的栈。向栈中不断压入数据时,若超出其容量就会耗尽栈对应的内存区域,从而触发一个页错误。此时若栈的大小低于堆栈最大值RLIMIT_STACK(通常是8M),则栈会动态增长,程序继续运行。映射的栈区扩展到所需大小后,不再收缩。
Linux中ulimit -s命令可查看和设置堆栈最大值,当程序使用的堆栈超过该值时, 发生栈溢出(Stack Overflow),程序收到一个段错误(Segmentation Fault)。注意,调高堆栈容量可能会增加内存开销和启动时间。
堆栈既可向下增长(向内存低地址)也可向上增长, 这依赖于具体的实现。本文所述堆栈向下增长。
栈的大小在运行时由内核动态调整。
1.1.7 栈和堆的区别
①管理方式:栈由编译器自动管理;堆由程序员控制,使用方便,但易产生内存泄露。
②生长方向:栈向低地址扩展(即”向下生长”),是连续的内存区域;堆向高地址扩展(即”向上生长”),是不连续的内存区域。这是由于系统用链表来存储空闲内存地址,自然不连续,而链表从低地址向高地址遍历。
③空间大小:栈顶地址和栈的最大容量由系统预先规定(通常默认2M或10M);堆的大小则受限于计算机系统中有效的虚拟内存,32位Linux系统中堆内存可达2.9G空间。
④存储内容:栈在函数调用时,首先压入主调函数中下条指令(函数调用语句的下条可执行语句)的地址,然后是函数实参,然后是被调函数的局部变量。本次调用结束后,局部变量先出栈,然后是参数,最后栈顶指针指向最开始存的指令地址,程序由该点继续运行下条可执行语句。堆通常在头部用一个字节存放其大小,堆用于存储生存期与函数调用无关的数据,具体内容由程序员安排。
⑤分配方式:栈可静态分配或动态分配。静态分配由编译器完成,如局部变量的分配。动态分配由alloca函数在栈上申请空间,用完后自动释放。堆只能动态分配且手工释放。
⑥分配效率:栈由计算机底层提供支持:分配专门的寄存器存放栈地址,压栈出栈由专门的指令执行,因此效率较高。堆由函数库提供,机制复杂,效率比栈低得多。Windows系统中VirtualAlloc可直接在进程地址空间中分配一块内存,快速且灵活。
⑦分配后系统响应:只要栈剩余空间大于所申请空间,系统将为程序提供内存,否则报告异常提示栈溢出。
操作系统为堆维护一个记录空闲内存地址的链表。当系统收到程序的内存分配申请时,会遍历该链表寻找第一个空间大于所申请空间的堆结点,然后将该结点从空闲结点链表中删除,并将该结点空间分配给程序。若无足够大小的空间(可能由于内存碎片太多),有可能调用系统功能去增加程序数据段的内存空间,以便有机会分到足够大小的内存,然后进行返回。,大多数系统会在该内存空间首地址处记录本次分配的内存大小,供后续的释放函数(如free/delete)正确释放本内存空间。
此外,由于找到的堆结点大小不一定正好等于申请的大小,系统会自动将多余的部分重新放入空闲链表中。
⑧碎片问题:栈不会存在碎片问题,因为栈是先进后出的队列,内存块弹出栈之前,在其上面的后进的栈内容已弹出。而频繁申请释放操作会造成堆内存空间的不连续,从而造成大量碎片,使程序效率降低。
可见,堆容易造成内存碎片;由于没有专门的系统支持,效率很低;由于可能引发用户态和内核态切换,内存申请的代价更为昂贵。所以栈在程序中应用最广泛,函数调用也利用栈来完成,调用过程中的参数、返回地址、栈基指针和局部变量等都采用栈的方式存放。所以,建议尽量使用栈,仅在分配大量或大块内存空间时使用堆。
使用栈和堆时应避免越界发生,否则可能程序崩溃或破坏程序堆、栈结构,产生意想不到的后果。
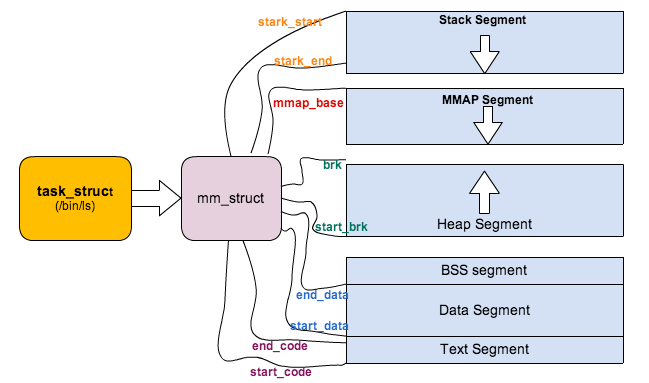
1.2 段和mm_struct关系
struct mm_struct是进程内存结构体,里面的参数和各段地址对应关系如下图。
struct mm_struct {
struct vm_area_struct *mmap; /* list of VMAs */
...
unsigned long mmap_base; /* base of mmap area */
unsigned long mmap_legacy_base; /* base of mmap area in bottom-up allocations */...
unsigned long start_code, end_code, start_data, end_data;
unsigned long start_brk, brk, start_stack;
unsigned long arg_start, arg_end, env_start, env_end;
...
struct mm_rss_stat rss_stat;
...
};
mm_strutc数据结构和段对应关系如下:
3. maps实例即如何异常定位
本实例中的用户空间地址从0x00000000到0x80000000,从地址空间划分可知,从低到高依次是:
- 可执行文件的代码段、数据段、BSS段。
- 堆heap。
- 文件映射和匿名映射,包括vdso、库的映射、mmap映射的内存等等。
- 栈stack。
- 通过top或者procrank之类工具发现某个进程存在内存泄漏的风险,然后查看进程的maps信息,进而可以缩小泄漏点范围。
一般情况下泄漏点常在堆和文件/匿名映射区域。
对于堆,需要了解哪些函数申请的内存在堆中,然后加以监控相关系统调用。
对于文件映射,定位较简单,可以通过文件名找到对应代码。
对于匿名映射,则需要根据大小或者地址范围猜测用途。当然也可以通过strace 跟踪和maps对应找到对应的泄漏点。
起始地址-结束地址 属性 偏移地址 主从设备号 inode编号 文件名
00008000-00590000 r-xp 00000000 b3:01 1441836 /root/xxx----------------------------可执行文件的代码段,下面分别是只读和可读写的段。00590000-005b2000 r--p 00587000 b3:01 1441836 /root/xxx
005b2000-005c4000 rw-p 005a9000 b3:01 1441836 /root/xxx
005c4000-0280c000 rwxp 00000000 00:00 0 [heap]-------------------------------如果堆在业务稳定后,还继续单向增加,则可能存在泄漏。
2aaa8000-2aac5000 r-xp 00000000 b3:01 786621 /lib/ld-2.28.9000.so-----------------下面是最复杂的部分,存在各种各种样的内存使用情况,大体上有库映射、匿名内存映射、文件内存映射等。
2aac5000-2aac6000 r--p 0001c000 b3:01 786621 /lib/ld-2.28.9000.so
2aac6000-2aac7000 rw-p 0001d000 b3:01 786621 /lib/ld-2.28.9000.so
2aac7000-2aac8000 r-xp 00000000 00:00 0 [vdso]
2aac8000-2aaca000 rw-p 00000000 00:00 0...
2d9aa000-2d9c8000 r-xp 00000000 b3:01 656126 /usr/lib/libv4lconvert.so.0.0.0
2d9c8000-2d9c9000 ---p 0001e000 b3:01 656126 /usr/lib/libv4lconvert.so.0.0.0
2d9c9000-2d9ca000 r--p 0001e000 b3:01 656126 /usr/lib/libv4lconvert.so.0.0.0
2d9ca000-2d9cb000 rw-p 0001f000 b3:01 656126 /usr/lib/libv4lconvert.so.0.0.0
2d9cb000-2da23000 rw-p 00000000 00:00 0...
3e8aa000-3e90c000 rw-s 00000000 00:06 5243 /dev/mem_cma
3ea00000-3ea42000 rw-p 00000000 00:00 0
3ea42000-3eb00000 ---p 00000000 00:00 07fa4a000-7fa6b000 rwxp 00000000 00:00 0 [stack]--------------------------------栈的大小是可变的,但是不能超过RLIMIT_STACK规定的大小。
3.1 堆内存
堆内存主要由malloc()/calloc()/realloc()/fre()申请释放,所以如果发生了堆泄漏就需要重点看着几个函数调用情况。
malloc()对应的系统调用是brk(),但是当申请超过128KB内存时就会调用mmap()。
关于堆内存管理参考:《Linux堆内存管理深入分析(上)》、《Linux堆内存管理深入分析(下)》、《对堆栈中分析的比较好的文章进行的总结》、《Linux内存分配小结–malloc、brk、mmap》、《Linux C 堆内存管理函数malloc()、calloc()、realloc()、free()详解》。
3.2 栈内存
栈的地址方向是从高到低,范围由RLIMIT_STACK规定。
可以通过ulimit -s查看,一般是8MB。
栈相关问题多是溢出问题。
3.3 mmap映射区
重点关注mmap相关调用《Linux内存管理 (9)mmap》、《Linux内存管理 (9)mmap(补充)》。
4. 让maps可读性更强
通过/proc/
在jupyter-notebook中输入如下脚本:
import re
import pandas as pd
import matplotlib.pyplot as plt
import sys
reload(sys)
sys.setdefaultencoding('utf8')
maps_filename="maps_aie_thd_165.txt"
#maps_filename="maps_init.txt"
maps_list=[]
maps_file = open(maps_filename, 'rb')
maps_columns = ["start", "end", "size(KB)", "filename", 'permission']
maps_process_end='80000000'
pre_end=0
for line in maps_file:
#00008000-0000b000 r-xp 00000000 b3:01 1023 /root/pidmax
#0000b000-0000c000 r--p 00002000 b3:01 1023 /root/pidmax
#0000c000-0000d000 rw-p 00003000 b3:01 1023 /root/pidmax
maps_line_fmt = '(?P<start>.{8})-(?P<end>.{8}) (?P<permission>.{4}) (?P<size>.{8}) (?P<major>.{2}):(?P<minor>.{2}) (?P<handle>[0-9]*) *(?P<filename>.*)'
m = re.match(maps_line_fmt, line)
if(not m):
continue
start = m.group('start')
end = m.group('end')
permission = m.group('permission')
#size = m.group('size')
#major = m.group('major')
#minor = m.group('minor')
#handle = m.group('handle')
filename = m.group('filename')
start_int = int(start, 16)
end_int = int(end, 16)
if(pre_end != start_int):
maps_list.append([ "{:0>8x}".format(pre_end), start, (start_int - pre_end)/1024, 'NOT USED', 'unknown'])
#print start+','+end+','+permission+','+filename
#---p r--p rw-p r-xp rwxp rw-s
if permission == '---p':
permission = 'guard/thread stack'
elif (permission == 'r--p'):
permission = 'readonly var'
elif (permission == 'rw-p'):
permission = 'read/write var'
elif (permission == 'r-xp'):
permission = 'code'
elif (permission == 'rwxp'):
permission = 'heap/stack'
elif (permission == 'rw-s'):
permission = 'sharememory'
else:
permission = 'unkown'
maps_list.append([start, end, (end_int - start_int)/1024, filename, permission])
pre_end = end_int
maps_file.close()
maps_list.append([end, maps_process_end, (int(maps_process_end, 16) - end_int)/1024, 'NOT USED', 'unknown'])
maps_pd = pd.DataFrame(columns=maps_columns, data=maps_list)
maps_pd.to_csv("maps.csv", encoding='utf-8')
print 'Total memory =', maps_pd['size(KB)'].sum()/1024,'(MB)'
rectangle_width = 800
maps_height_base = 40
maps_height_diff = 160
maps_size_min = maps_pd['size(KB)'].min()
maps_size_max = 16384
rectangle_x = 50
rectangle_y = 50
fig = plt.figure()
ax = fig.add_subplot(111)
for index, maps in maps_pd.iterrows():
rectangle_height = (float)(min(maps_size_max, maps['size(KB)']) - maps_size_min)*maps_height_diff/maps_size_max + maps_height_base
if maps['filename'] == 'NOT USED':
color = 'red'
text_color = 'white'
else:
color_value = (int)((float)(min(maps_size_max, maps['size(KB)']) - maps_size_min)/maps_size_max*0xffffff)
color = '#%06x'%(color_value)
text_color = '#%06x'%(0xffffff - color_value)
if maps['size(KB)'] >= 1024:
maps_label = "(%.2fMB)%s(%s)"%((float)(maps["size(KB)"])/1024, maps["filename"], maps['permission'])
else:
maps_label = "(%dKB)%s(%s)"%(maps["size(KB)"], maps["filename"], maps['permission'])
#print rectangle_x, rectangle_y, rectangle_width, rectangle_height, maps['size(KB)'], color
plt.bar(rectangle_x, rectangle_height, width=rectangle_width, bottom=rectangle_y, align='edge',facecolor=color, linewidth=1, edgecolor='red')
plt.text(rectangle_x+10, rectangle_y+rectangle_height/2, maps_label, horizontalalignment='left', verticalalignment='center', color=text_color, fontsize=12)
rectangle_y += rectangle_height
plt.xlim(0, rectangle_width+100)
plt.ylim(0, rectangle_y+100)
plt.axis('off')
#plt.show()
fig.set_size_inches(rectangle_width/100, rectangle_y/100)
fig.savefig('maps.svg', dpi=120, bbox_inches='tight', format='svg')
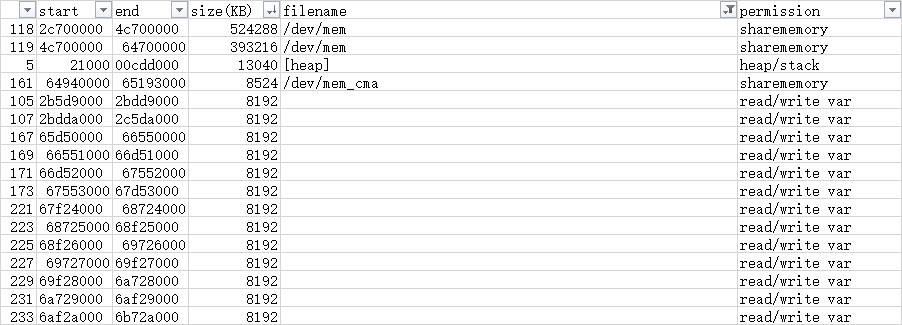
输出两份文档:maps.csv和maps.svg,一个是对每个vma进行文本统计,一个是将maps图形化。
- 查看未使用区域,从大到小排列。
可以看出进程虚拟地址空间的空闲大小,以及分布在哪里。
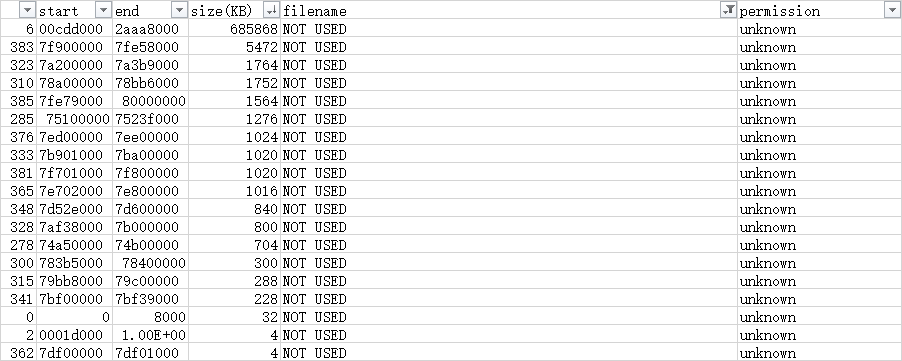
- 查看已使用区域,从大到小排列。
可以看出进程虚拟内存都被谁使用了,是否有异常。
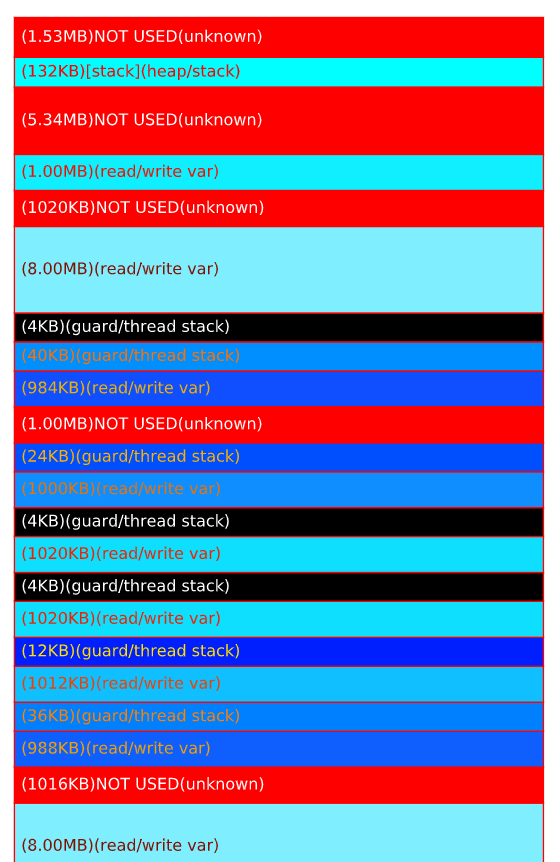
3. maps图形化
未使用部分用红色高亮显示,高度根据大小响应变化。
其他模块颜色和大小都根据模块变化。