1 前言
本章介绍迪杰斯特拉算法。和以往一样,本文会先对迪杰斯特拉算法的理论论知识进行介绍,然后给出C语言的实现。后续再分别给出C++和Java版本的实现。
2 迪杰斯特拉算法介绍
迪杰斯特拉(Dijkstra)算法是典型最短路径算法,用于计算一个节点到其他节点的最短路径。
它的主要特点是以起始点为中心向外层层扩展(广度优先搜索思想),直到扩展到终点为止。
2.1 基本思想
通过Dijkstra计算图G中的最短路径时,需要指定起点s(即从顶点s开始计算)。
此外,引进两个集合S和U。S的作用是记录已求出最短路径的顶点(以及相应的最短路径长度),而U则是记录还未求出最短路径的顶点(以及该顶点到起点s的距离)。
初始时,S中只有起点s;U中是除s之外的顶点,并且U中顶点的路径是”起点s到该顶点的路径”。然后,从U中找出路径最短的顶点,并将其加入到S中;接着,更新U中的顶点和顶点对应的路径。 然后,再从U中找出路径最短的顶点,并将其加入到S中;接着,更新U中的顶点和顶点对应的路径。 … 重复该操作,直到遍历完所有顶点。
2.2 操作步骤
(1) 初始时,S只包含起点s;U包含除s外的其他顶点,且U中顶点的距离为”起点s到该顶点的距离”[例如,U中顶点v的距离为(s,v)的长度,然后s和v不相邻,则v的距离为∞]。
(2) 从U中选出”距离最短的顶点k”,并将顶点k加入到S中;同时,从U中移除顶点k。
(3) 更新U中各个顶点到起点s的距离。之所以更新U中顶点的距离,是由于上一步中确定了k是求出最短路径的顶点,从而可以利用k来更新其它顶点的距离;例如,(s,v)的距离可能大于(s,k)+(k,v)的距离。
(4) 重复步骤(2)和(3),直到遍历完所有顶点。
单纯的看上面的理论可能比较难以理解,下面通过实例来对该算法进行说明。
2.3 迪杰斯特拉算法图解
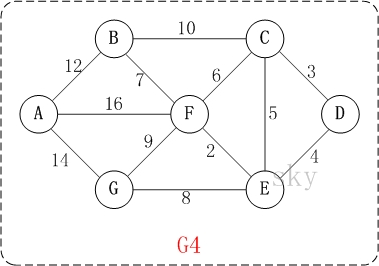
以上图G4为例,来对迪杰斯特拉进行算法演示(以第4个顶点D为起点)。
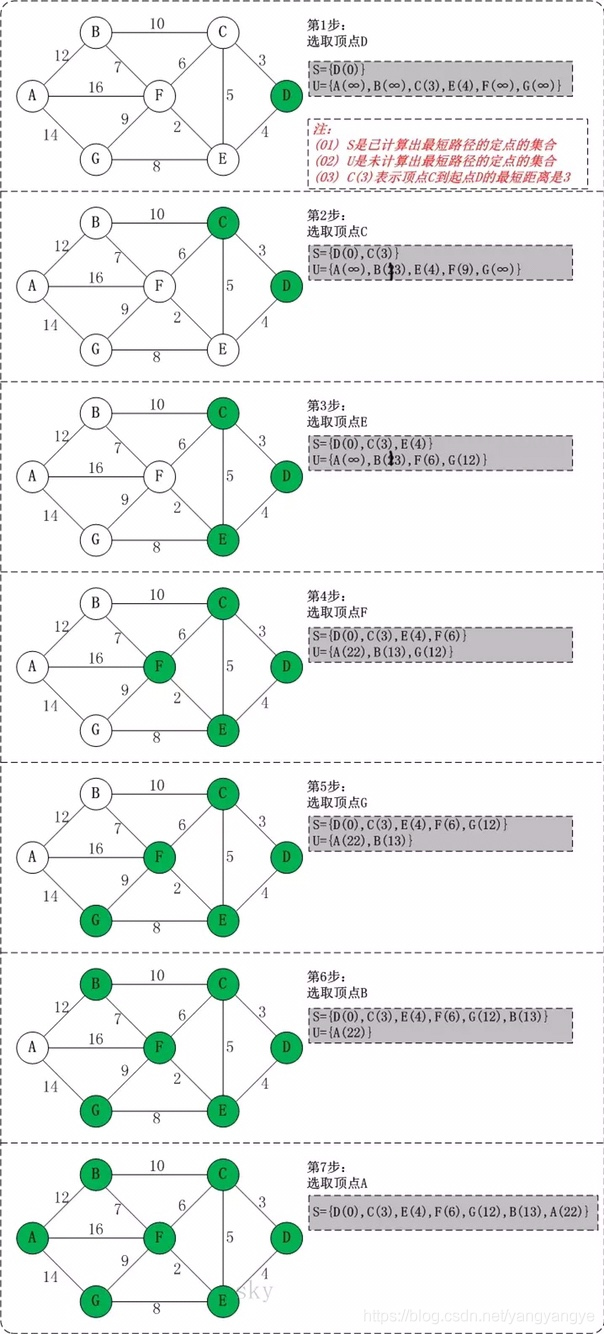
初始状态:S是已计算出最短路径的顶点集合,U是未计算除最短路径的顶点的集合!
第1步:将顶点D加入到S中。
此时,S={D(0)}, U={A(∞),B(∞),C(3),E(4),F(∞),G(∞)}。 注:C(3)表示C到起点D的距离是3。
第2步:将顶点C加入到S中。
上一步操作之后,U中顶点C到起点D的距离最短;因此,将C加入到S中,同时更新U中顶点的距离。以顶点F为例,之前F到D的距离为∞;但是将C加入到S之后,F到D的距离为9=(F,C)+(C,D)。
此时,S={D(0),C(3)}, U={A(∞),B(13),E(4),F(9),G(∞)}。
第3步:将顶点E加入到S中。
上一步操作之后,U中顶点E到起点D的距离最短;因此,将E加入到S中,同时更新U中顶点的距离。还是以顶点F为例,之前F到D的距离为9;但是将E加入到S之后,F到D的距离为6=(F,E)+(E,D)。
此时,S={D(0),C(3),E(4)}, U={A(∞),B(13),F(6),G(12)}。
第4步:将顶点F加入到S中。
此时,S={D(0),C(3),E(4),F(6)}, U={A(22),B(13),G(12)}。
第5步:将顶点G加入到S中。
此时,S={D(0),C(3),E(4),F(6),G(12)}, U={A(22),B(13)}。
第6步:将顶点B加入到S中。
此时,S={D(0),C(3),E(4),F(6),G(12),B(13)}, U={A(22)}。
第7步:将顶点A加入到S中。
此时,S={D(0),C(3),E(4),F(6),G(12),B(13),A(22)}。
此时,起点D到各个顶点的最短距离就计算出来了:A(22) B(13) C(3) D(0) E(4) F(6) G(12)。
3. 迪杰斯特拉算法实现
3.1 C实现
以”邻接矩阵”为例对迪杰斯特拉算法进行说明,对于”邻接表”实现的图在后面会给出相应的源码。
3.1.1. 基本定义
// 邻接矩阵
typedef struct _graph
{
char vexs[MAX]; // 顶点集合
int vexnum; // 顶点数
int edgnum; // 边数
int matrix[MAX][MAX]; // 邻接矩阵
}Graph, *PGraph;
// 边的结构体
typedef struct _EdgeData
{
char start; // 边的起点
char end; // 边的终点
int weight; // 边的权重
}EData;
Graph是邻接矩阵对应的结构体。
vexs用于保存顶点,vexnum是顶点数,edgnum是边数;matrix则是用于保存矩阵信息的二维数组。例如,matrix[i][j]=1,则表示”顶点i(即vexs[i])”和”顶点j(即vexs[j])”是邻接点;matrix[i][j]=0,则表示它们不是邻接点。
EData是邻接矩阵边对应的结构体。
3.1.2. 迪杰斯特拉算法
/*
* Dijkstra最短路径。
* 即,统计图(G)中"顶点vs"到其它各个顶点的最短路径。
*
* 参数说明:
* G -- 图
* vs -- 起始顶点(start vertex)。即计算"顶点vs"到其它顶点的最短路径。
* prev -- 前驱顶点数组。即,prev[i]的值是"顶点vs"到"顶点i"的最短路径所经历的全部顶点中,位于"顶点i"之前的那个顶点。
* dist -- 长度数组。即,dist[i]是"顶点vs"到"顶点i"的最短路径的长度。
*/
void dijkstra(Graph G, int vs, int prev[], int dist[])
{
int i,j,k;
int min;
int tmp;
int flag[MAX]; // flag[i]=1表示"顶点vs"到"顶点i"的最短路径已成功获取。
// 初始化
for (i = 0; i < G.vexnum; i++)
{
flag[i] = 0; // 顶点i的最短路径还没获取到。
prev[i] = 0; // 顶点i的前驱顶点为0。
dist[i] = G.matrix[vs][i];// 顶点i的最短路径为"顶点vs"到"顶点i"的权。
}
// 对"顶点vs"自身进行初始化
flag[vs] = 1;
dist[vs] = 0;
// 遍历G.vexnum-1次;每次找出一个顶点的最短路径。
for (i = 1; i < G.vexnum; i++)
{
// 寻找当前最小的路径;
// 即,在未获取最短路径的顶点中,找到离vs最近的顶点(k)。
min = INF;
for (j = 0; j < G.vexnum; j++)
{
if (flag[j]==0 && dist[j]<min)
{
min = dist[j];
k = j;
}
}
// 标记"顶点k"为已经获取到最短路径
flag[k] = 1;
// 修正当前最短路径和前驱顶点
// 即,当已经"顶点k的最短路径"之后,更新"未获取最短路径的顶点的最短路径和前驱顶点"。
for (j = 0; j < G.vexnum; j++)
{
tmp = (G.matrix[k][j]==INF ? INF : (min + G.matrix[k][j])); // 防止溢出
if (flag[j] == 0 && (tmp < dist[j]) )
{
dist[j] = tmp;
prev[j] = k;
}
}
}
// 打印dijkstra最短路径的结果
printf("dijkstra(%c): \n", G.vexs[vs]);
for (i = 0; i < G.vexnum; i++)
printf(" shortest(%c, %c)=%d\n", G.vexs[vs], G.vexs[i], dist[i]);
}
3.2 C++实现
3.2.1. 基本定义
class MatrixUDG {
#define MAX 100
#define INF (~(0x1<<31)) // 无穷大(即0X7FFFFFFF)
private:
char mVexs[MAX]; // 顶点集合
int mVexNum; // 顶点数
int mEdgNum; // 边数
int mMatrix[MAX][MAX]; // 邻接矩阵
public:
// 创建图(自己输入数据)
MatrixUDG();
// 创建图(用已提供的矩阵)
//MatrixUDG(char vexs[], int vlen, char edges[][2], int elen);
MatrixUDG(char vexs[], int vlen, int matrix[][9]);
~MatrixUDG();
// 深度优先搜索遍历图
void DFS();
// 广度优先搜索(类似于树的层次遍历)
void BFS();
// prim最小生成树(从start开始生成最小生成树)
void prim(int start);
// 克鲁斯卡尔(Kruskal)最小生成树
void kruskal();
// Dijkstra最短路径
void dijkstra(int vs, int vexs[], int dist[]);
// 打印矩阵队列图
void print();
private:
// 读取一个输入字符
char readChar();
// 返回ch在mMatrix矩阵中的位置
int getPosition(char ch);
// 返回顶点v的第一个邻接顶点的索引,失败则返回-1
int firstVertex(int v);
// 返回顶点v相对于w的下一个邻接顶点的索引,失败则返回-1
int nextVertex(int v, int w);
// 深度优先搜索遍历图的递归实现
void DFS(int i, int *visited);
// 获取图中的边
EData* getEdges();
// 对边按照权值大小进行排序(由小到大)
void sortEdges(EData* edges, int elen);
// 获取i的终点
int getEnd(int vends[], int i);
};
MatrixUDG是邻接矩阵对应的结构体。
mVexs用于保存顶点,mVexNum是顶点数,mEdgNum是边数;mMatrix则是用于保存矩阵信息的二维数组。例如,mMatrix[i][j]=1,则表示”顶点i(即mVexs[i])”和”顶点j(即mVexs[j])”是邻接点;mMatrix[i][j]=0,则表示它们不是邻接点。
3.2.2. 迪杰斯特拉算法
/*
* Dijkstra最短路径。
* 即,统计图中"顶点vs"到其它各个顶点的最短路径。
*
* 参数说明:
* vs -- 起始顶点(start vertex)。即计算"顶点vs"到其它顶点的最短路径。
* prev -- 前驱顶点数组。即,prev[i]的值是"顶点vs"到"顶点i"的最短路径所经历的全部顶点中,位于"顶点i"之前的那个顶点。
* dist -- 长度数组。即,dist[i]是"顶点vs"到"顶点i"的最短路径的长度。
*/
void MatrixUDG::dijkstra(int vs, int prev[], int dist[])
{
int i,j,k;
int min;
int tmp;
int flag[MAX]; // flag[i]=1表示"顶点vs"到"顶点i"的最短路径已成功获取。
// 初始化
for (i = 0; i < mVexNum; i++)
{
flag[i] = 0; // 顶点i的最短路径还没获取到。
prev[i] = 0; // 顶点i的前驱顶点为0。
dist[i] = mMatrix[vs][i]; // 顶点i的最短路径为"顶点vs"到"顶点i"的权。
}
// 对"顶点vs"自身进行初始化
flag[vs] = 1;
dist[vs] = 0;
// 遍历mVexNum-1次;每次找出一个顶点的最短路径。
for (i = 1; i < mVexNum; i++)
{
// 寻找当前最小的路径;
// 即,在未获取最短路径的顶点中,找到离vs最近的顶点(k)。
min = INF;
for (j = 0; j < mVexNum; j++)
{
if (flag[j]==0 && dist[j]<min)
{
min = dist[j];
k = j;
}
}
// 标记"顶点k"为已经获取到最短路径
flag[k] = 1;
// 修正当前最短路径和前驱顶点
// 即,当已经"顶点k的最短路径"之后,更新"未获取最短路径的顶点的最短路径和前驱顶点"。
for (j = 0; j < mVexNum; j++)
{
tmp = (mMatrix[k][j]==INF ? INF : (min + mMatrix[k][j]));
if (flag[j] == 0 && (tmp < dist[j]) )
{
dist[j] = tmp;
prev[j] = k;
}
}
}
// 打印dijkstra最短路径的结果
cout << "dijkstra(" << mVexs[vs] << "): " << endl;
for (i = 0; i < mVexNum; i++)
cout << " shortest(" << mVexs[vs] << ", " << mVexs[i] << ")=" << dist[i] << endl;
}
3.3 迪杰斯特拉算法—Java实现
java的实现和C++实现基本上一样的了
4. 迪杰斯特拉算法的源码
这里分别给出”邻接矩阵图”和”邻接表图”的迪杰斯特拉算法源码。
1. 邻接矩阵源码(matrix_udg.c)
2. 邻接表源码(list_udg.c)
############################################################
参考2
Dijkstra算法
1.定义概览
Dijkstra(迪杰斯特拉)算法是典型的单源最短路径算法,用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止。Dijkstra算法是很有代表性的最短路径算法,在很多专业课程中都作为基本内容有详细的介绍,如数据结构,图论,运筹学等等。注意该算法要求图中不存在负权边。
问题描述:在无向图 G=(V,E) 中,假设每条边 E[i] 的长度为 w[i],找到由顶点 V0 到其余各点的最短路径。(单源最短路径)
2.算法描述
1)算法思想:设G=(V,E)是一个带权有向图,把图中顶点集合V分成两组,第一组为已求出最短路径的顶点集合(用S表示,初始时S中只有一个源点,以后每求得一条最短路径 , 就将加入到集合S中,直到全部顶点都加入到S中,算法就结束了),第二组为其余未确定最短路径的顶点集合(用U表示),按最短路径长度的递增次序依次把第二组的顶点加入S中。在加入的过程中,总保持从源点v到S中各顶点的最短路径长度不大于从源点v到U中任何顶点的最短路径长度。此外,每个顶点对应一个距离,S中的顶点的距离就是从v到此顶点的最短路径长度,U中的顶点的距离,是从v到此顶点只包括S中的顶点为中间顶点的当前最短路径长度。
2)算法步骤:
a.初始时,S只包含源点,即S={v},v的距离为0。U包含除v外的其他顶点,即:U={其余顶点},若v与U中顶点u有边,则<u,v>正常有权值,若u不是v的出边邻接点,则<u,v>权值为∞。
b.从U中选取一个距离v最小的顶点k,把k,加入S中(该选定的距离就是v到k的最短路径长度)。
c.以k为新考虑的中间点,修改U中各顶点的距离;若从源点v到顶点u的距离(经过顶点k)比原来距离(不经过顶点k)短,则修改顶点u的距离值,修改后的距离值的顶点k的距离加上边上的权。
d.重复步骤b和c直到所有顶点都包含在S中。
执行动画过程如下图
3.算法代码实现:
const int MAXINT = 32767;
const int MAXNUM = 10;
int dist[MAXNUM];
int prev[MAXNUM];
int A[MAXUNM][MAXNUM];
void Dijkstra(int v0)
{
bool S[MAXNUM]; // 判断是否已存入该点到S集合中
int n=MAXNUM;
for(int i=1; i<=n; ++i)
{
dist[i] = A[v0][i];
S[i] = false; // 初始都未用过该点
if(dist[i] == MAXINT)
prev[i] = -1;
else
prev[i] = v0;
}
dist[v0] = 0;
S[v0] = true;
for(int i=2; i<=n; i++)
{
int mindist = MAXINT;
int u = v0; // 找出当前未使用的点j的dist[j]最小值
for(int j=1; j<=n; ++j)
if((!S[j]) && dist[j]<mindist)
{
u = j; // u保存当前邻接点中距离最小的点的号码
mindist = dist[j];
}
S[u] = true;
for(int j=1; j<=n; j++)
if((!S[j]) && A[u][j]<MAXINT)
{
if(dist[u] + A[u][j] < dist[j]) //在通过新加入的u点路径找到离v0点更短的路径
{
dist[j] = dist[u] + A[u][j]; //更新dist
prev[j] = u; //记录前驱顶点
}
}
}
}
4.算法实例
先给出一个无向图
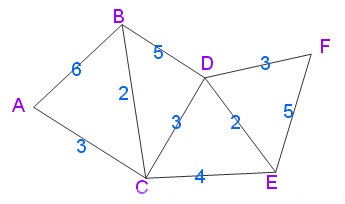
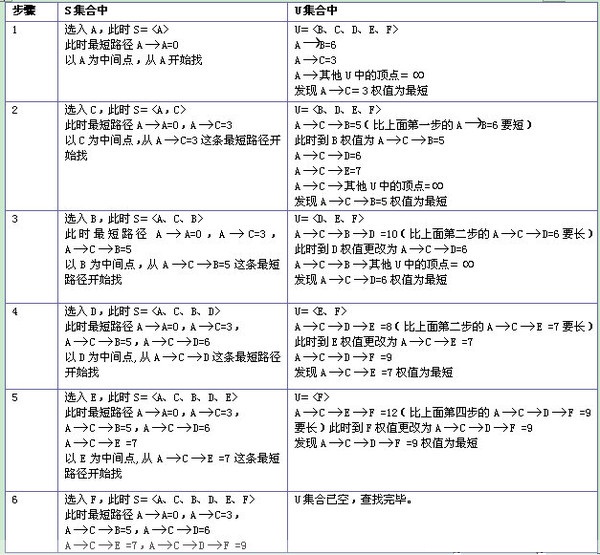
用Dijkstra算法找出以A为起点的单源最短路径步骤如下
Floyd算法
1.定义概览
Floyd-Warshall算法(Floyd-Warshall algorithm)是解决任意两点间的最短路径的一种算法,可以正确处理有向图或负权的最短路径问题,同时也被用于计算有向图的传递闭包。Floyd-Warshall算法的时间复杂度为O(N3),空间复杂度为O(N2)。
2.算法描述
1)算法思想原理:
Floyd算法是一个经典的动态规划算法。用通俗的语言来描述的话,首先我们的目标是寻找从点i到点j的最短路径。从动态规划的角度看问题,我们需要为这个目标重新做一个诠释(这个诠释正是动态规划最富创造力的精华所在)
从任意节点i到任意节点j的最短路径不外乎2种可能,1是直接从i到j,2是从i经过若干个节点k到j。所以,我们假设Dis(i,j)为节点u到节点v的最短路径的距离,对于每一个节点k,我们检查Dis(i,k) + Dis(k,j) < Dis(i,j)是否成立,如果成立,证明从i到k再到j的路径比i直接到j的路径短,我们便设置Dis(i,j) = Dis(i,k) + Dis(k,j),这样一来,当我们遍历完所有节点k,Dis(i,j)中记录的便是i到j的最短路径的距离。
2).算法描述:
a.从任意一条单边路径开始。所有两点之间的距离是边的权,如果两点之间没有边相连,则权为无穷大。
b.对于每一对顶点 u 和 v,看看是否存在一个顶点 w 使得从 u 到 w 再到 v 比己知的路径更短。如果是更新它。
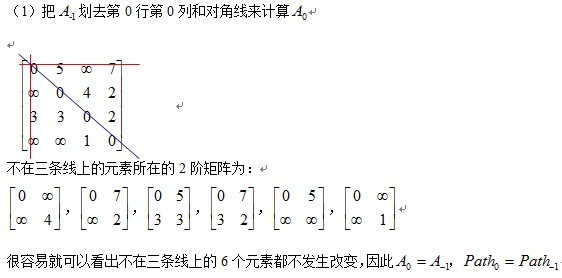
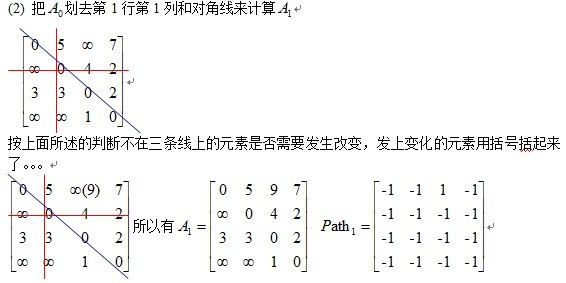
3).Floyd算法过程矩阵的计算—-十字交叉法
方法:两条线,从左上角开始计算一直到右下角 如下所示
给出矩阵,其中矩阵A是邻接矩阵,而矩阵Path记录u,v两点之间最短路径所必须经过的点
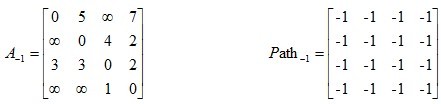
相应计算方法如下:
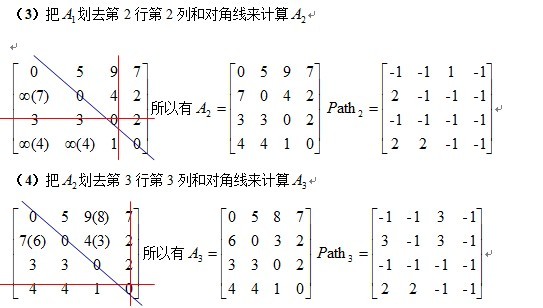
最后A3即为所求结果
3.算法代码实现
typedef struct
{
char vertex[VertexNum]; //顶点表
int edges[VertexNum][VertexNum]; //邻接矩阵,可看做边表
int n,e; //图中当前的顶点数和边数
}MGraph;
void Floyd(MGraph g)
{
int A[MAXV][MAXV];
int path[MAXV][MAXV];
int i,j,k,n=g.n;
for(i=0;i<n;i++)
for(j=0;j<n;j++)
{
A[i][j]=g.edges[i][j];
path[i][j]=-1;
}
for(k=0;k<n;k++)
{
for(i=0;i<n;i++)
for(j=0;j<n;j++)
if(A[i][j]>(A[i][k]+A[k][j]))
{
A[i][j]=A[i][k]+A[k][j];
path[i][j]=k;
}
}
}
算法时间复杂度:O(n3)